-
AuthorPosts
-
-
September 25, 2019 at 6:54 pm #9397Russell MedinaKeymaster
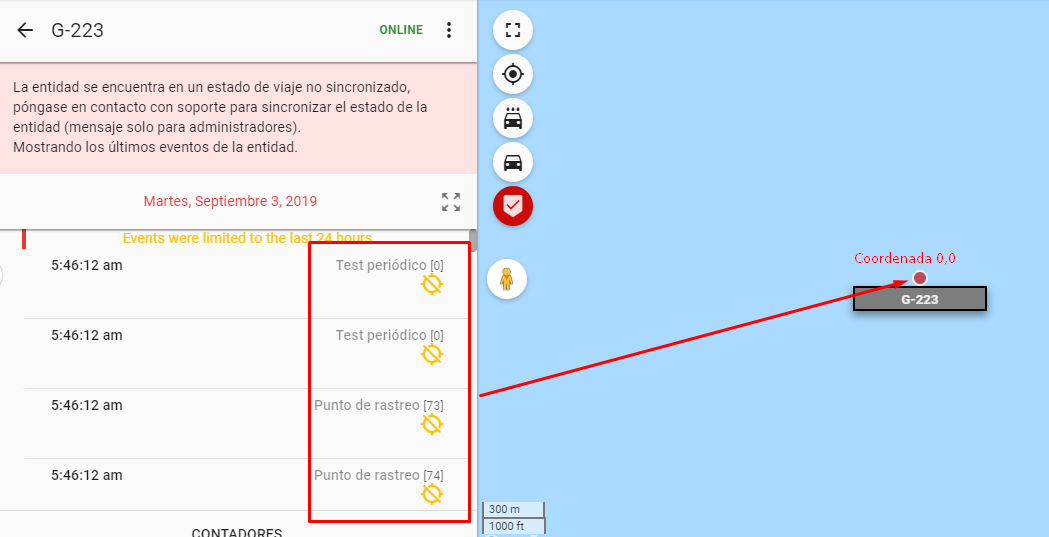
En este post encontraras la solución a cuando el dispositivo pierde la señal GPS y toma la coordenada 0,0 Y cuando el vehículo se mantiene estático o con poco movimiento pero da brincos de movimiento (falsos movimientos).
Los casos se pueden apreciar en las siguientes imágenes.
Caso 1.- Cuando el dispositivo pierde señal GPS y toma la coordenada 0,0
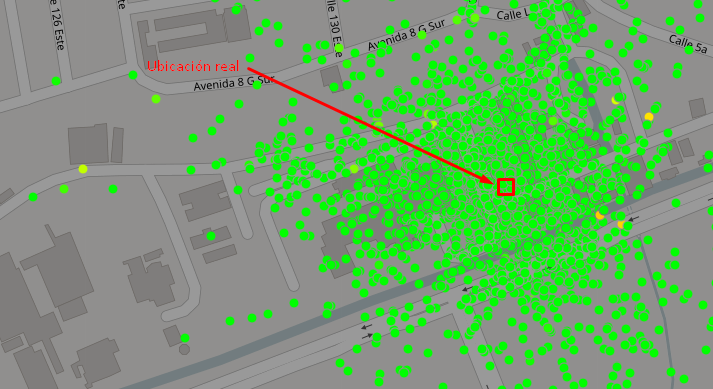
Caso 2.- Brincos del gps aunque el dispositivo este estacionado o con poco movimiento (Mayormente este problema se da en maquinarias amarillas que están con poco movimiento con la ignición en ON).
Pueden afectar muchos factores para poder dar una posición correcta, tales como, incluida la atmósfera, las desviaciones en el curso del satélite y las obstrucciones externas más importantes que bloquean / alteran las señales de satélite del receptor GPS, etc.
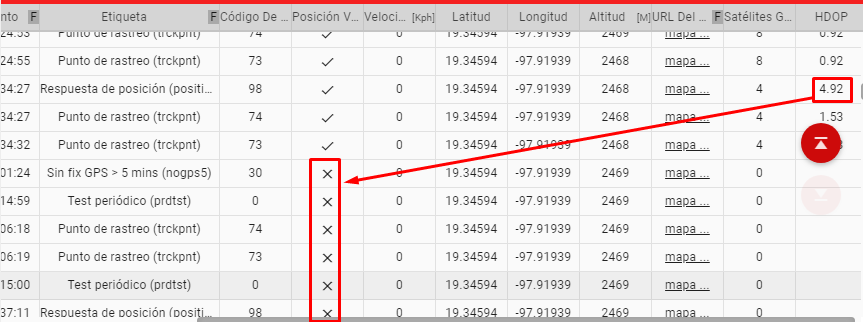
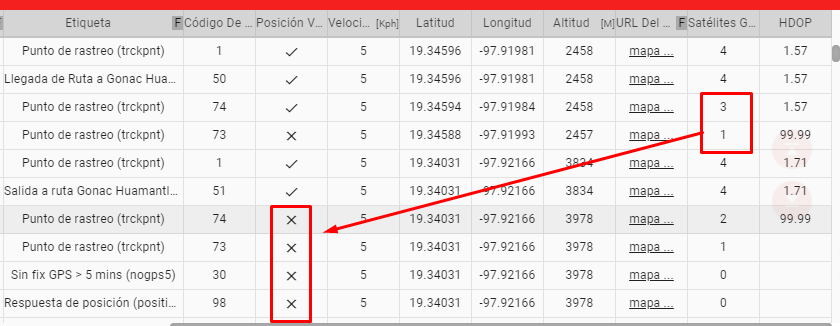
En los casos presentados anteriormente suelen darse específicamente 2 factores, un HDOP alto y falta de satélites en vista.
Un HDOP adecuado es menor de 2.0 y los satélites en vista para dar una posición correcta son un mínimo de 4.
Podemos consultar el HDOP y los satélites en vista de nuestro dispositivo en rawdata. En las imágenes siguientes se muestra como se pierde la posición valida a causa de los dos motivos mencionados.
SOLUCIÓN
Para evitar estas pérdidas de señal GPS y falsos movimientos, Syrus viene predefinido con un filtro que no permite que un dispositivo actualice posición hasta que cumpla lo siguiente:
- GPS Fix: mínimo de 4 satélites GPS a la vista para calcular la posición y la hora
- Movimiento detectado – con el acelerómetro interno de Syrus
- Velocidad más rápida que 3 Mph
Para agregar un filtro lo hacemos con el siguiente comando >SXAEC::gps 9 1 xxx y z<
xxx: HDOP mínimo permitido (un número menor significa más precisión) (recomendado entre 100 y 200)
y – Considera movimiento (0 falso – significa que no considera movimiento, 1 verdadero – significa que sí)
z – Límite mínimo de velocidad a superar antes de actualizar las coordenadas GPS. (El valor predeterminado es 3 mph)
Un ejemplo seria >SXAEC::gps 9 1 150 1 3<
Después de enviar el comando del filtro aplicar un reset al dispositivo y al modulo GPS del dispositivo y el problema ya no debe persistir mas
Pueden aprender mas sobre el filtro antidrift acá: https://support.digitalcomtech.com/tutorials/syrus-gps-anti-filter/
- This topic was modified 6 years, 7 months ago by Russell Medina.
-
-
AuthorPosts
- You must be logged in to reply to this topic.

